Literature Database Entry
sossalla2025multi-access
Peter Sossalla, "Multi-Access Edge Computing for Mobile Robots," PhD Thesis, Faculty of Electrical and Computer Engineering, Technical University of Dresden (TUD), February 2025. (Advisor: Frank H. P. Fitzek; Referees: Frank H. P. Fitzek, Falko Dressler and Aydin Sezgin)
Abstract
With the advancing deployment of 5G technology and the promise of low-latency and highly reliable wireless communication, the use of 5G connectivity for the control of mobile robots is gaining traction. These mobile robots commonly have strong latency and reliability requirements that 5G aims to fulfill. The concept of Multi-Access Edge Computing (MEC) additionally enables the offloading of computationally expensive processes from mobile systems to the edge of the network. Especially for battery-powered mobile robots, MEC can reduce the load onboard and increase the runtime. Simultaneous Localization and Mapping (SLAM) is an essential function of mobile robots to localize themselves with sensor information of the environment. With the sensor input, SLAM creates a map and simultaneously uses this map for localization. SLAM, especially Visual SLAM (vSLAM) that uses camera images as sensor input, are computationally expensive processes and are viable candidates for offloading with MEC. The estimated current position must be provided to the mobile robot with a low delay, since other functions such as navigation depend on localization. This work focuses on the wireless control of mobile robots with 5G and offloading of vSLAM with MEC. A feasibility study is presented that evaluates private 5G networks for mobile robot control use cases. This is followed by a Proof of Concept (PoC), which demonstrates offloading of a mobile robot’s functions with MEC using a 5G network. A solution for convenient and reliable control of mobile robots with Augmented Reality (AR) is presented. For this use case, adaptive camera image streaming, mapping with vSLAM and image rendering for AR glasses is offloaded with MEC. An evaluation of the influence of parameterization and system design on the processing speed of offloaded vSLAM follows. After an extensive analysis, an enhanced offloaded vSLAM system is introduced that is more resilient and less impacted by an increasing network latency. Additionally, Dynamic Visual SLAM Network Offloading (DynNet-SLAM) is proposed, an approach to orchestrate the computation of vSLAM depending on the currently measured network latency. DynNetSLAM further increases the reliability in an environment of fluctuating latency.
Quick access
Contact
Peter Sossalla
BibTeX reference
@phdthesis{sossalla2025multi-access,
author = {Sossalla, Peter},
title = {{Multi-Access Edge Computing for Mobile Robots}},
advisor = {Fitzek, Frank H. P.},
institution = {Faculty of Electrical and Computer Engineering},
location = {Dresden, Germany},
month = {2},
referee = {Fitzek, Frank H. P. and Dressler, Falko and Sezgin, Aydin},
school = {Technical University of Dresden (TUD)},
type = {PhD Thesis},
year = {2025},
}
Copyright notice
Links to final or draft versions of papers are presented here to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author's copyright. In most cases, these works may not be reposted or distributed for commercial purposes without the explicit permission of the copyright holder.
The following applies to all papers listed above that have IEEE copyrights: Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.
The following applies to all papers listed above that are in submission to IEEE conference/workshop proceedings or journals: This work has been submitted to the IEEE for possible publication. Copyright may be transferred without notice, after which this version may no longer be accessible.
The following applies to all papers listed above that have ACM copyrights: ACM COPYRIGHT NOTICE. Permission to make digital or hard copies of part or all of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. Copyrights for components of this work owned by others than ACM must be honored. Abstracting with credit is permitted. To copy otherwise, to republish, to post on servers, or to redistribute to lists, requires prior specific permission and/or a fee. Request permissions from Publications Dept., ACM, Inc., fax +1 (212) 869-0481, or permissions@acm.org.
The following applies to all SpringerLink papers listed above that have Springer Science+Business Media copyrights: The original publication is available at www.springerlink.com.
This page was automatically generated using BibDB and bib2web.
Featured Paper
- Coordinated Spatial Reuse Scheduling With Machine Learning in IEEE 802.11 MAPC Networks
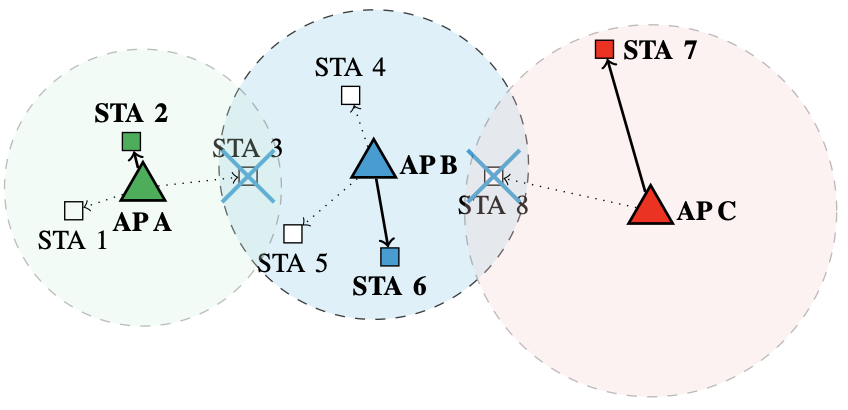
The densification of Wi-Fi deployments means that fully distributed random channel access is no longer sufficient for high and predictable performance. Therefore, the ...
News
- July 10, 2025
Guest Lecture: Artificial Intelligence and the Internet of Bio-Nano-Things
Our team member Jorge Torres Gómez gave a lecture on the ... - July 10, 2025
New Elsevier Computer Communications article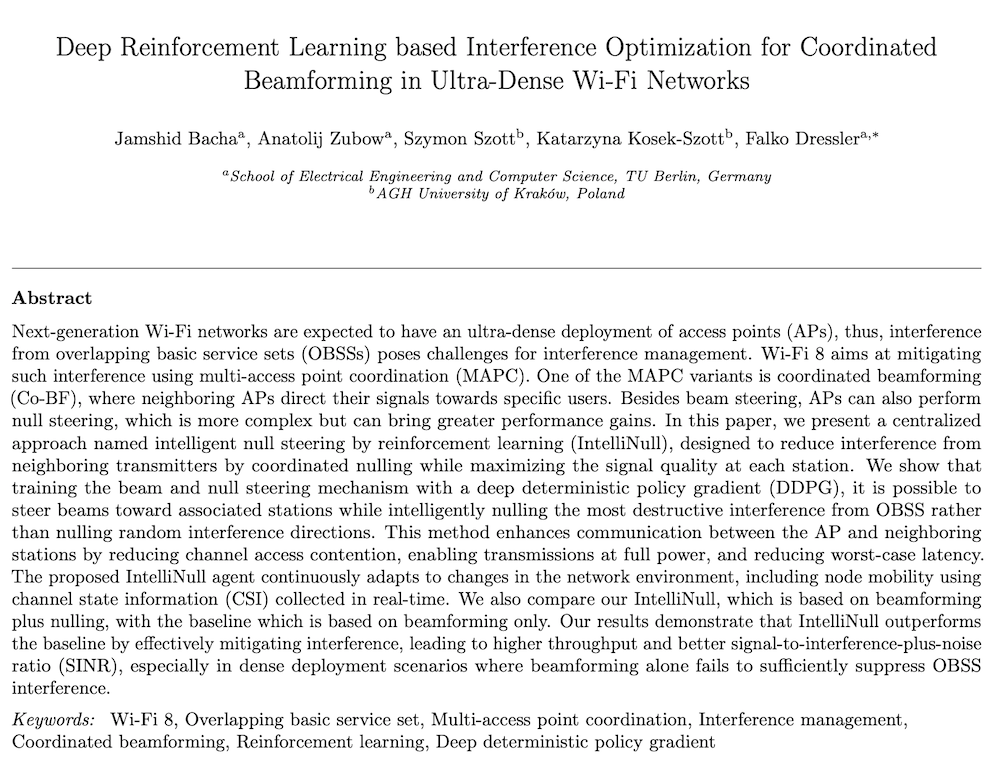
Our article Deep Reinforcement Learning based Interferenc... - July 02, 2025
TKN team at Berlin 6G Conference
The TKN team joined the Berlin 6G Conference to discuss r... - June 20, 2025
New DFG project SmartSynch
Our proposal Synchronizing in the nanoscale: A research p... - June 16, 2025
New IEEE Transactions on Mobile Computing article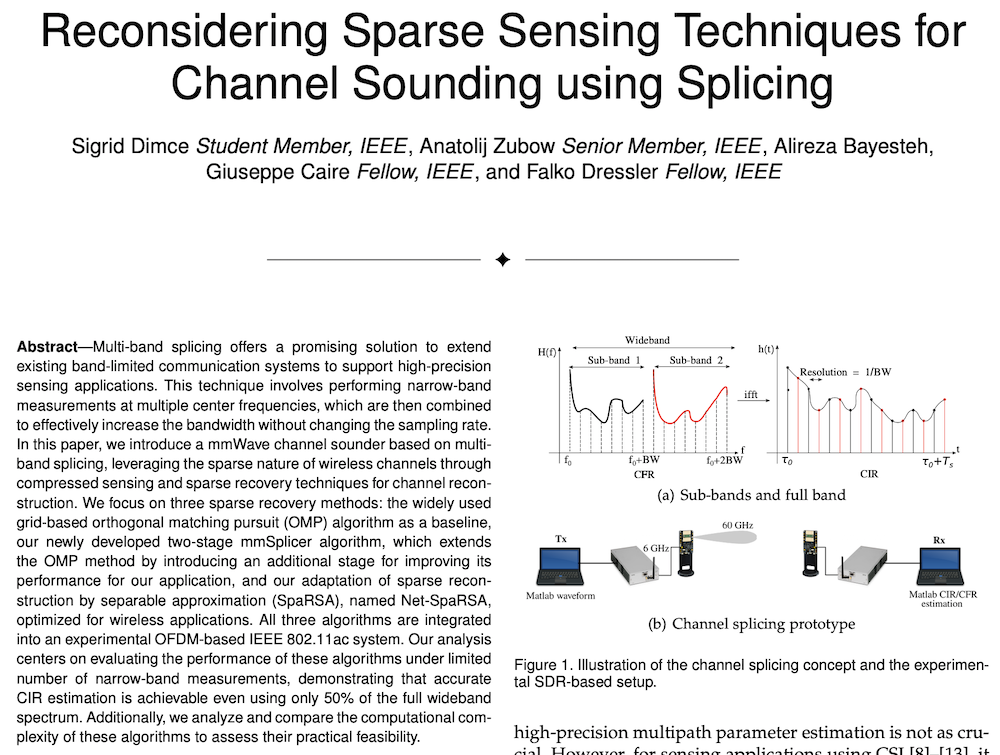
Our article Reconsidering Sparse Sensing Techniques for C...