Literature Database Entry
neurauter2023motion
Rene Neurauter, Andreas Holzinger, Michael Neuhauser, Jan-Thomas Fischer and Johannes Gerstmayr, "Motion Reconstruction of Fast-rotating Rigid Bodies," Journal of Computational and Nonlinear Dynamics, vol. 19 (1), pp. 011005, January 2024.
Abstract
Motion reconstruction and navigation require accurate orientation estimation. Modern orientation estimation methods utilize filtering algorithms, such as the Kalman filter or Madgwick's algorithm. However, these methods do not address potential sensor saturation, which may occur within short time periods in highly dynamic applications, such as, e.g., particle tracking in snow avalanches, leading to inaccurate orientation estimates. In this paper, we present two algorithms for orientation estimation combining magnetometer and partially saturated gyrometer readings. One algorithm incorporates magnetic field vector observations and the full nonlinearity of the exponential map. The other, computationally more efficient algorithm builds on a linearization of the exponential map and is solved analytically. Both algorithms are then applied to measurement data from four different experiments, with two of them being snow avalanche experiments. Moreover, Madgwick's filtering algorithm was used to validate the proposed algorithms. The two algorithms improved the orientation estimation significantly in all experiments. Hence, the proposed algorithms can improve the performance of existing sensor fusion algorithms significantly.
Quick access
Original Version ![]() (at publishers web site)
(at publishers web site)
BibTeX ![]()
Contact
Rene Neurauter
Andreas Holzinger
Michael Neuhauser
Jan-Thomas Fischer
Johannes Gerstmayr
BibTeX reference
@article{neurauter2023motion,
author = {Neurauter, Rene and Holzinger, Andreas and Neuhauser, Michael and Fischer, Jan-Thomas and Gerstmayr, Johannes},
doi = {10.1115/1.4063952},
title = {{Motion Reconstruction of Fast-rotating Rigid Bodies}},
pages = {011005},
journal = {Journal of Computational and Nonlinear Dynamics},
issn = {1555-1423},
publisher = {The American Society of Mechanical Engineers (ASME)},
month = {1},
number = {1},
volume = {19},
year = {2024},
}
Copyright notice
Links to final or draft versions of papers are presented here to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author's copyright. In most cases, these works may not be reposted or distributed for commercial purposes without the explicit permission of the copyright holder.
The following applies to all papers listed above that have IEEE copyrights: Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.
The following applies to all papers listed above that are in submission to IEEE conference/workshop proceedings or journals: This work has been submitted to the IEEE for possible publication. Copyright may be transferred without notice, after which this version may no longer be accessible.
The following applies to all papers listed above that have ACM copyrights: ACM COPYRIGHT NOTICE. Permission to make digital or hard copies of part or all of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. Copyrights for components of this work owned by others than ACM must be honored. Abstracting with credit is permitted. To copy otherwise, to republish, to post on servers, or to redistribute to lists, requires prior specific permission and/or a fee. Request permissions from Publications Dept., ACM, Inc., fax +1 (212) 869-0481, or permissions@acm.org.
The following applies to all SpringerLink papers listed above that have Springer Science+Business Media copyrights: The original publication is available at www.springerlink.com.
This page was automatically generated using BibDB and bib2web.
Featured Paper
- Communicating Smartly in Molecular Communication Environments: Neural Networks in the Internet of Bio-Nano Things
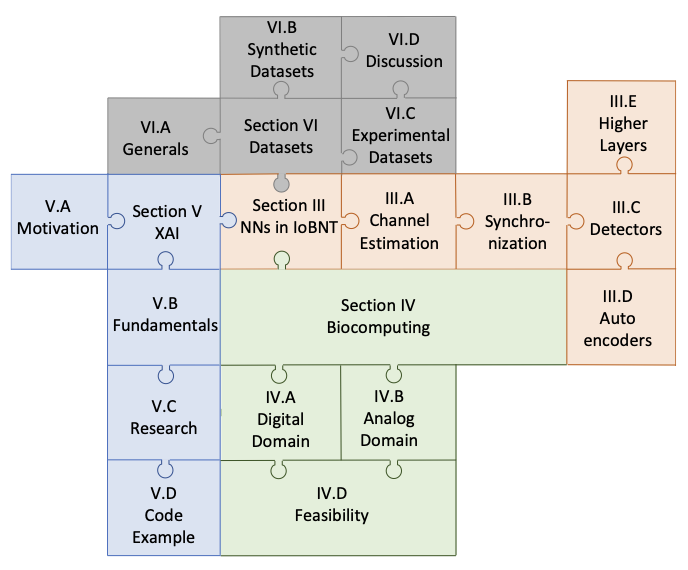
Recent developments in the Internet of Bio-Nano Things (IoBNT) are laying the foundation for innovative healthcare applications. Nanodevices designed to operate within...
News
- July 03, 2026
Keynote at IEEE GreenNet 2026
Falko Dressler gave a keynote titled 6G Edge Computing: I... - July 02, 2026
Best Poster Award at IEEE MAIN 2026
Elena Tonini received a Best Poster Award for our paper D... - June 29, 2026
Best Paper Award at WASA 2026
Our team member Youming Tao received a Best Paper Award f... - June 10, 2026
Paper Presentation at IEEE VNC 2026
TKN and former CCS members met at 17th IEEE Vehicular Net... - May 27, 2026
Paper Presentation at IEEE ICC 2026
Our team member Lisa Y. Debus presented our paper titled ...