Literature Database Entry
gonzalez-rodriguez2022analytic
Arturo Antonio González Rodríguez, "Analytic Approaches for Obtaining the Communications Requirements of String Stable Platooning," PhD Thesis, Faculty of Electrical and Computer Engineering, Technical University of Dresden (TUD), March 2022. (Advisor: Gerhard P. Fettweis; Referees: Gerhard P. Fettweis and Falko Dressler)
Abstract
Mobile radio networks promise to enable connected automated driving simultane- ously with other automated applications, such as those from Industry 4.0. Stringent communications demands on networks are expected from these interconnected automated processes. Since it is anticipated that these appliances share network resources, the issue of shortage of radio resources quickly exacerbates with an increasing number of devices. The radio resource bottleneck exhibits itself as a performance degradation of the connected automated processes. For the case of con- nected automated driving, the consequences of this communications deterioration can be catastrophic, underscoring the importance of fulfilling their communications demands. From a network perspective, the efficient usage of the shared communica- tions resources is likewise significant; the network aims at maximizing the number of connected users without compromising their operation. Within connected automated driving, platooning is a relevant application given its benefits in safety, traffic and energy efficiency. These advantages only prevail if the platoon remains string-stable for short intervehicle distances. String stability in con- nected platooning is determined by distinctive interdependences among the control and communications parameters. While simulation-based studies have broadened the intuition on such interdependencies, their rigorous mathematical description has been missing. The primary aim of this thesis is to formulate a mathematical framework that reveals the interdependences among the communications and control variables of platoons. From the proposed models, communications requirements of string-stable platoons can be obtained analytically in terms of the platoon dynamic properties. These properties are mostly dictated and stated in terms of the control loop parameters of its member vehicles. By studying the dynamic properties of the vehicle models under a well-defined performance metric, the proposed frameworks relate the control parameters with the communications variables. Under centrally managed channel access schemes and negilible packet losses on the vehicular links due to line-of-sight transmissions, interference-free discrete-time periodic communications can be enforced. For this case, a frequency-domain model was developed for obtaining the periodic maximum allowed transmission intervals, the maximum allowed delay and their tradeoffs for enabling string-stable heteroge- neous platoons. These results are further used as QoS constraints in the design of a LTE-V2X semi-persistent scheduler and validated via numerical simulation. A generalization of the models for considering non-deterministic communications intervals due to aperiodic transmissions and packet losses on the vehicular link was further developed. Relying on the theory of dissipative systems, an aperiodic maximum allowed transmission interval per vehicular link is found. For obtaining the upper bounds on the probability of packet losses that a string-stable platoon can tolerate, the system is modeled as a stochastic switching system. The resulting switching model incorporates not only the vehicular kinematics, but also additional properties such as the dynamics of the tracked signal of the preceding vehicle and packet loss probabilities on the considered vehicular communications link. The generalized models explain how discrete-time communications introduces a communications-induced error into the control system on time intervals in-between receptions. This revelation motivated applying state estimation techniques to further relax the aperiodic maximum allowed transmission intervals and the upper bounds on the probability of packet losses per link of a string-stable platoon. Results show that communications requirements of string-stable platoons strongly depend on the control loop parameters dictating the dynamic properties of the vehicles. The resulting upper bounds on packet loss probabilities and transmis- sion intervals do not always fall into the stringent domain as commonly theorized, especially when state estimation techniques are employed on the follower cars. Consequently, the scalability problem in the network is alleviated by exploiting the vehicles’ dynamic properties. Furthermore the heterogeneity of vehicles induce different communications demands within platoon members, providing additional degrees of freedom for the radio resource allocation. An implication of understanding communications-control interdependencies is en- couraging the development of strategies in either control or communications to compensate deficiencies in their respective co-domain. Another ramification of the findings in this work is on establishing a new paradigm for communications engi- neers interconnecting heterogeneous automated processes: their distinct dynamic properties provide a type of diversity that is exploitable through radio resource management. While the here derived methodologies explain the interdependencies between the co- domains of communications and control in connected platooning and the presented results apply only for this use-case, the present research and techniques may serve as incentive and tools for expanding the knowledge and obtaining communications requirements of other networked automated processes.
Quick access
Contact
Arturo Antonio González Rodríguez
BibTeX reference
@phdthesis{gonzalez-rodriguez2022analytic,
author = {Gonz{\'{a}}lez Rodr{\'{i}}guez, Arturo Antonio},
title = {{Analytic Approaches for Obtaining the Communications Requirements of String Stable Platooning}},
advisor = {Fettweis, Gerhard P.},
institution = {Faculty of Electrical and Computer Engineering},
location = {Dresden, Germany},
month = {3},
referee = {Fettweis, Gerhard P. and Dressler, Falko},
school = {Technical University of Dresden (TUD)},
type = {PhD Thesis},
year = {2022},
}
Copyright notice
Links to final or draft versions of papers are presented here to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author's copyright. In most cases, these works may not be reposted or distributed for commercial purposes without the explicit permission of the copyright holder.
The following applies to all papers listed above that have IEEE copyrights: Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.
The following applies to all papers listed above that are in submission to IEEE conference/workshop proceedings or journals: This work has been submitted to the IEEE for possible publication. Copyright may be transferred without notice, after which this version may no longer be accessible.
The following applies to all papers listed above that have ACM copyrights: ACM COPYRIGHT NOTICE. Permission to make digital or hard copies of part or all of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. Copyrights for components of this work owned by others than ACM must be honored. Abstracting with credit is permitted. To copy otherwise, to republish, to post on servers, or to redistribute to lists, requires prior specific permission and/or a fee. Request permissions from Publications Dept., ACM, Inc., fax +1 (212) 869-0481, or permissions@acm.org.
The following applies to all SpringerLink papers listed above that have Springer Science+Business Media copyrights: The original publication is available at www.springerlink.com.
This page was automatically generated using BibDB and bib2web.
Featured Paper
- Coordinated Spatial Reuse Scheduling With Machine Learning in IEEE 802.11 MAPC Networks
The densification of Wi-Fi deployments means that fully distributed random channel access is no longer sufficient for high and predictable performance. Therefore, the ...
News
- July 02, 2025
TKN team at Berlin 6G Conference
The TKN team joined the Berlin 6G Conference to discuss r... - June 20, 2025
New DFG project SmartSynch
Our proposal Synchronizing in the nanoscale: A research p... - June 16, 2025
New IEEE Transactions on Mobile Computing article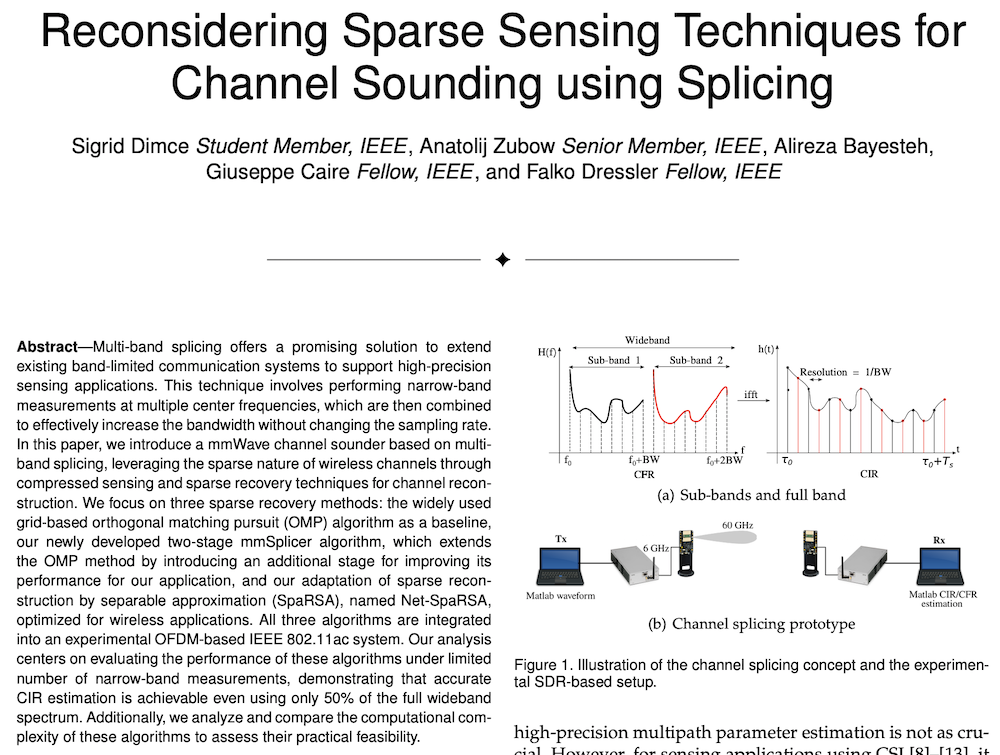
Our article Reconsidering Sparse Sensing Techniques for C... - June 15, 2025
New IEEE Transactions on Wireless Communications article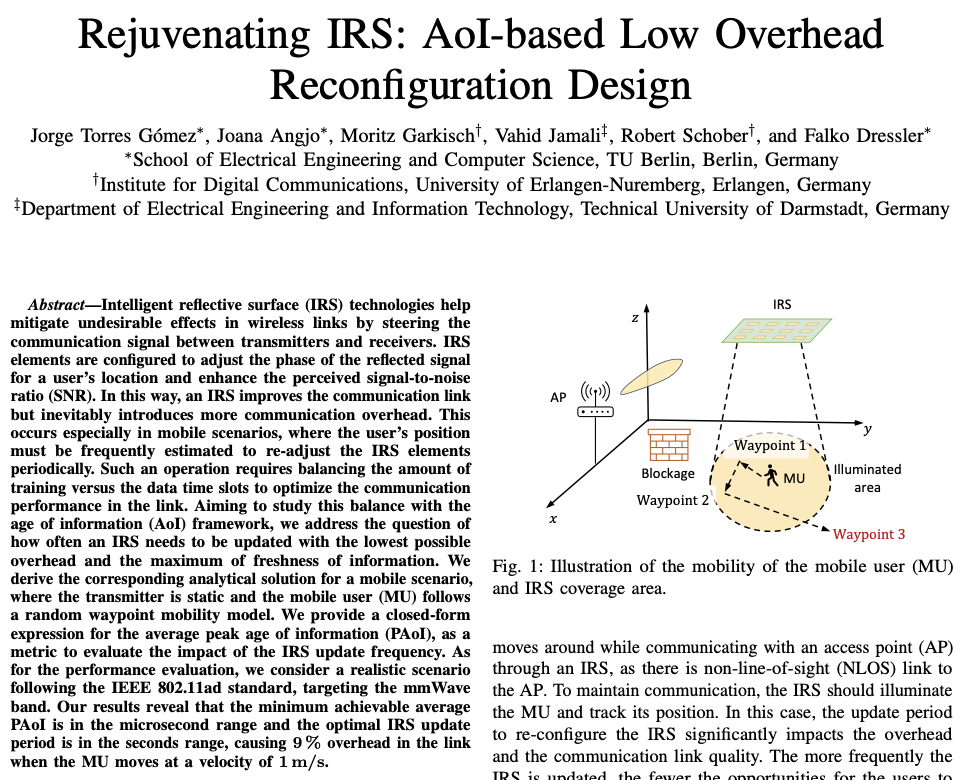
Our article Rejuvenating IRS: AoI-based Low Overhead Reco... - June 13, 2025
New IEEE Open Journal of Intelligent Transportation Systems article
Our article Incentive-based Platoon Formation: Optimizing...