Literature Database Entry
shen2023visible
Wen-Hsuan Shen, "Visible Light Communication and Relative Positioning Systems for Connected Autonomous Vehicles," PhD Thesis, Department of Computer Science and Information Engineering, National Taiwan University (NTU), July 2023. (Advisor: Hsin-Mu Tsai; Referee: Falko Dressler)
Abstract
The platoon formation of connected autonomous vehicles (CAVs) is crucial in the next-generation intelligent transportation system (ITS), improving road utilization, fuel consumption, and safety. In a platoon, vehicles continuously share their status information (e.g., the speed, positioning information, throttle, and brake application) via vehicle-to-vehicle (V2V) communications to maintain a uniform driving strategy. As a result, V2V communication and positioning are regarded as two essential components in realizing platooning. Meanwhile, modern vehicles are equipped with LED lighting systems for headlights, taillights, and other lighting. LED is a suitable transmitter (sometimes even receiver) for developing visible light communication (VLC). Leveraging LED technology for communication offers several advantages, including line-of-sight propagation, The line-of-sight propagation of the light, which reduces interference caused by multipath effects and enhances communication and positioning performance. Transforming automotive lighting into a triple-functionality device – communication, positioning, and illumination – can lead to significant cost savings and efficient utilization of resources. This dissertation focuses on developing automotive lighting devices with triple functionality, enabling communication and positioning capabilities using visible light. This study presents two communication and one positioning system based on visible light. First, we present RayTrack, an interference-free outdoor mobile VLC system composed of a digital micromirror device, photodiodes, and an LED. RayTrack can dynamically narrow and adjust its field-of-view according to the transmitter location, effectively mitigating interference from the environment and other transmitters, thus boosting the system throughput. Real-world driving experiments show that RayTrack can achieve a data rate of 607.9 kbps with over 90% detection accuracy at 35 m at driving speeds of 70 - 100 km/hr. The second VLC system comprises a new type of CMOS sensor called a dynamic vision sensor (DVS). DVS monitors the brightness change in each pixel and only generates outputs when it detects a significant change. As the first research endeavor on using a DVS for communication, we examine the event detection performance of DVS with various modulation schemes. According to the preliminary results, we use OOK with Manchester coding for modulation and train an LSTM-based classifier to decode the OOK symbols. Real-world driving experiments show that the DVS-based VLC system achieves a data rate of 2.96 kbps with a bit error rate (BER) lower than 15% at a distance of 30 m. Moreover, it can receive information from multiple transmitters, making it suitable as a side channel for securing V2V communications in platoons. In the last part of this dissertation, we introduce a vehicle localization system based on a projector serving as the headlight, and the receiver is a customized color sensor array. We adopt differential phase shift keying (DPSK) to create a fringe pattern, enabling single-shot positioning. Accurate positioning is achieved by analyzing the received frequency and demodulated phase information. Real-world and dynamic results show that the proposed system can achieve cm-level positioning with a positioning error of 30 cm at a detection distance of 20 m.
Quick access
Contact
Wen-Hsuan Shen
BibTeX reference
@phdthesis{shen2023visible,
author = {Shen, Wen-Hsuan},
title = {{Visible Light Communication and Relative Positioning Systems for Connected Autonomous Vehicles}},
advisor = {Tsai, Hsin-Mu},
institution = {Department of Computer Science and Information Engineering},
location = {Taipei, Taiwan},
month = {7},
referee = {Dressler, Falko},
school = {National Taiwan University (NTU)},
type = {PhD Thesis},
year = {2023},
}
Copyright notice
Links to final or draft versions of papers are presented here to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author's copyright. In most cases, these works may not be reposted or distributed for commercial purposes without the explicit permission of the copyright holder.
The following applies to all papers listed above that have IEEE copyrights: Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.
The following applies to all papers listed above that are in submission to IEEE conference/workshop proceedings or journals: This work has been submitted to the IEEE for possible publication. Copyright may be transferred without notice, after which this version may no longer be accessible.
The following applies to all papers listed above that have ACM copyrights: ACM COPYRIGHT NOTICE. Permission to make digital or hard copies of part or all of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. Copyrights for components of this work owned by others than ACM must be honored. Abstracting with credit is permitted. To copy otherwise, to republish, to post on servers, or to redistribute to lists, requires prior specific permission and/or a fee. Request permissions from Publications Dept., ACM, Inc., fax +1 (212) 869-0481, or permissions@acm.org.
The following applies to all SpringerLink papers listed above that have Springer Science+Business Media copyrights: The original publication is available at www.springerlink.com.
This page was automatically generated using BibDB and bib2web.
Featured Paper
- Incentive-based Platoon Formation: Optimizing the Personal Benefit for Drivers
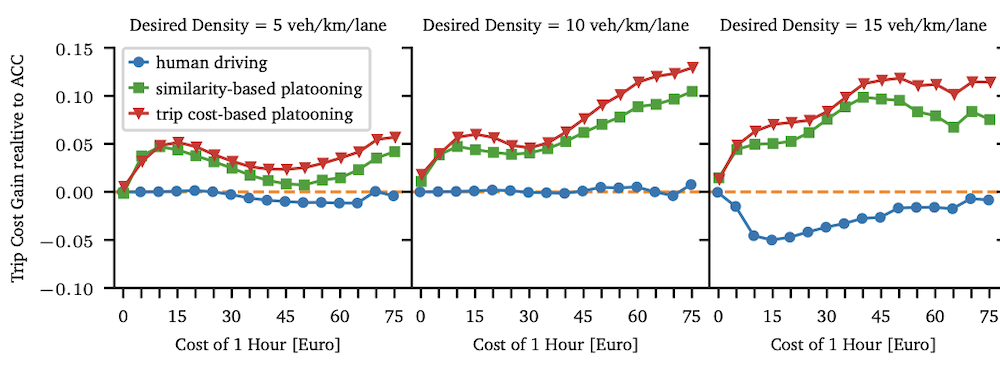
Platooning or cooperative adaptive cruise control (CACC) has been investigated for decades, but debate about its lasting impact is still ongoing. While the benefits of...
News
- June 16, 2025
New IEEE Transactions on Mobile Computing article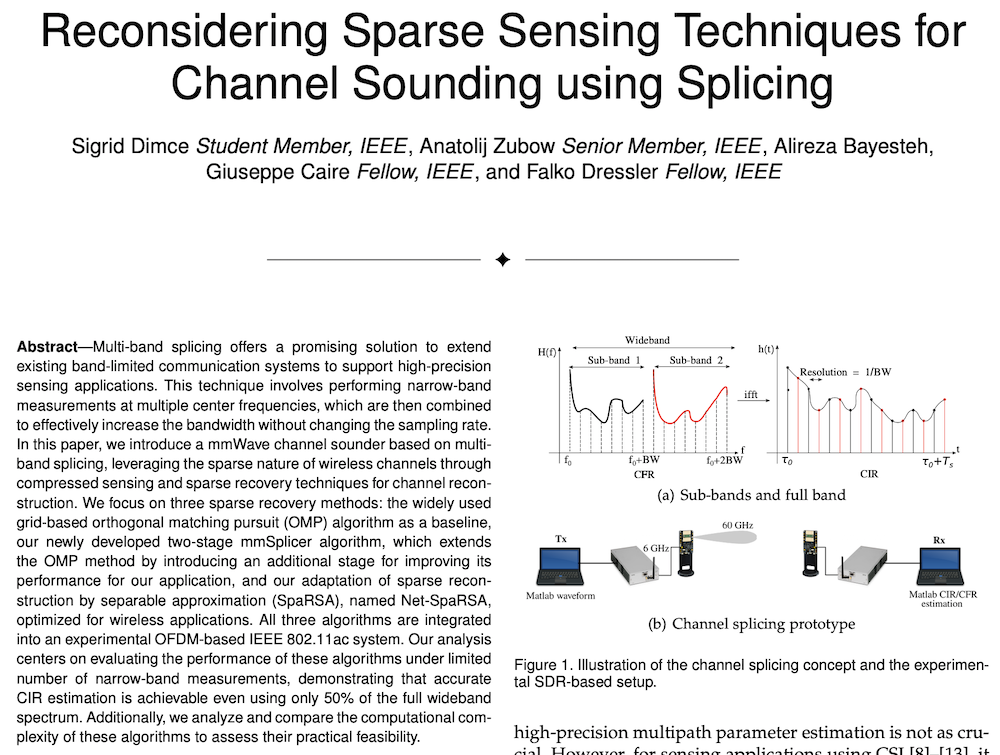
Our article Reconsidering Sparse Sensing Techniques for C... - June 15, 2025
New IEEE Transactions on Wireless Communications article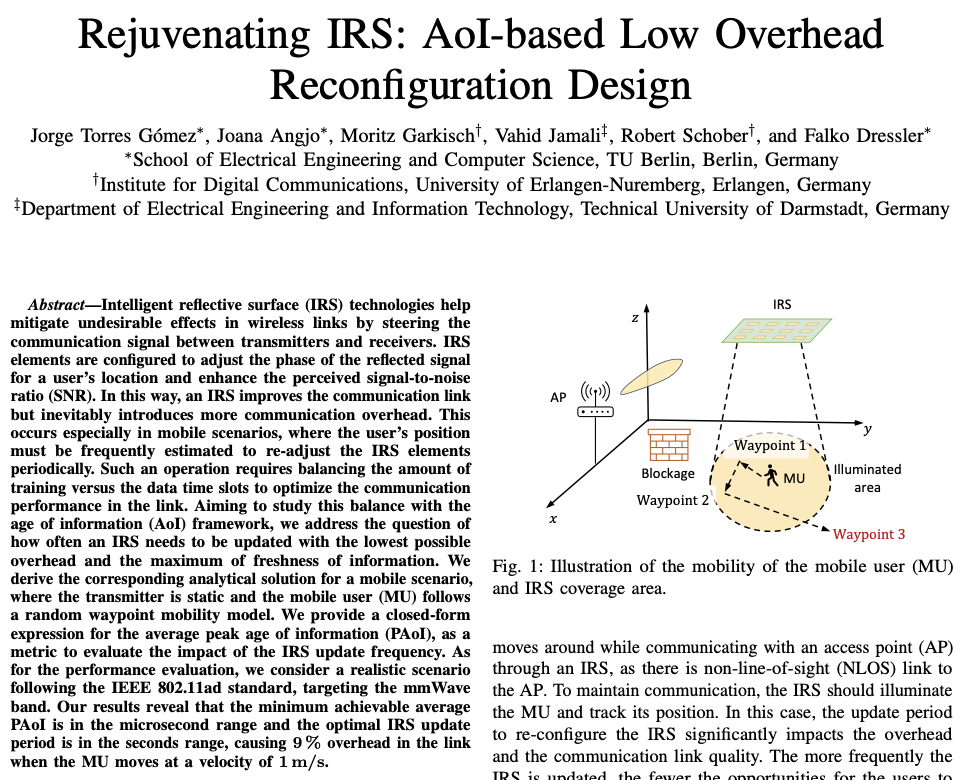
Our article Rejuvenating IRS: AoI-based Low Overhead Reco... - June 13, 2025
New IEEE Open Journal of Intelligent Transportation Systems article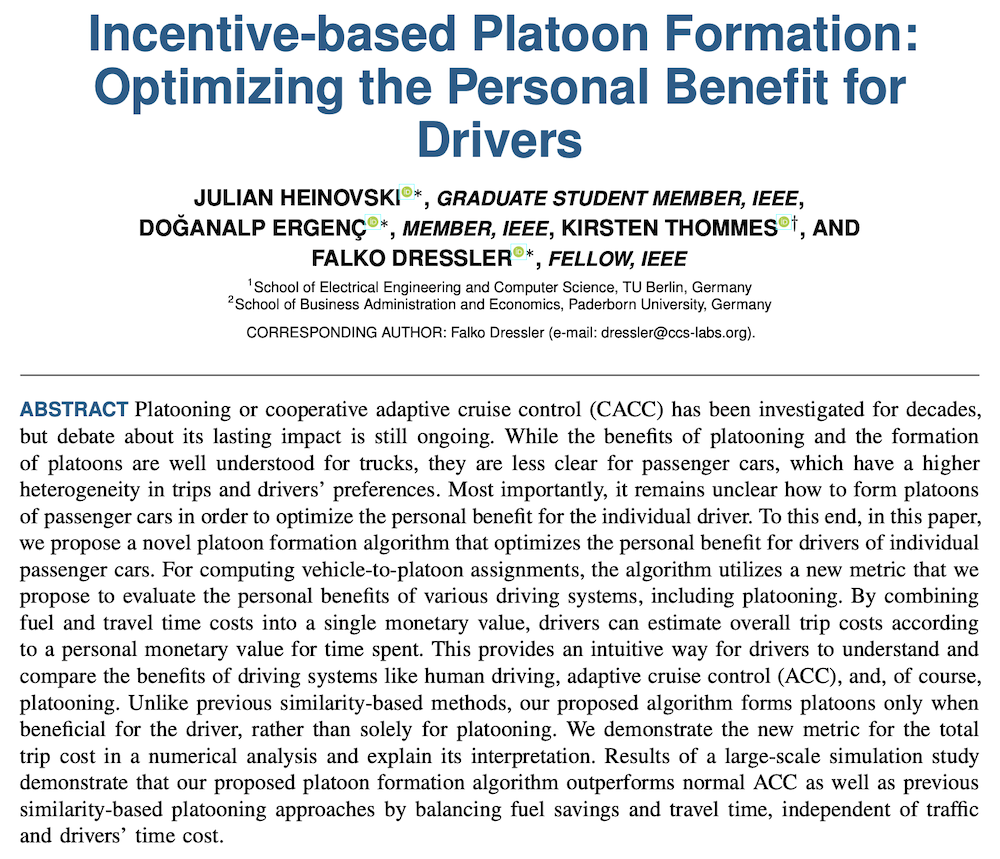
Our article Incentive-based Platoon Formation: Optimizing... - June 11, 2025
Paper Presentation at IEEE ICC 2025
Osman Tugay Başaran presented our paper Next-Gen AI-on-RA... - June 10, 2025
New Elsevier Theoretical Computer Science article
Our article Robust Matroid Bandit Optimization: Near-Opti...