Literature Database Entry
kloiber2014broadcast
Bernhard Robert Kloiber, "Energieeffiziente Concast-Kommunikation in drahtlosen Sensornetzen," PhD Thesis, Ecole Doctorale Informatique, Telecommunications et Electronique, Telecom Paristech, December 2014. (Advisors: Jérôme Härri and Thomas Strang; Referees: Andre-Luc Beylot and Falko Dressler)
Abstract
Whereas passive safety systems more and more reach their physical limits, active safety systems are going to determine the road map towards a ”zero-accidents” vision. A big potential is seen in Vehicular Adhoc NETworks (VANETs). They are expected to go far beyond the capabilities of local radar- and vision-based sensors, by providing an enhanced view of the current environment, known as cooperative awareness. Therefore, vehicles are compelled to periodically broadcast safety-related information (e.g. position, speed, heading) to their neighbors. For that they use ITS-G5, a fully decentralized communications technology based on IEEE 802.11. IEEE 802.11’s PHYsical (PHY) and Medium Access Control (MAC) layer have been slightly adapted to support vehicular environments (e.g. multi-path delays, transient connections). However, VANETs introduce new cooperative safety applications, differing significantly in terms of communications policies and requirements. Especially the broadcast policy for safety-related information disables IEEE 802.11’s collision avoidance mechanisms, like the exponential increase of the contention window, or the Request To Send / Clear To Send (RTS/CTS) handshake. Without them, the amount of packet collisions increases significantly under heavy communication loads, resulting in a distinct degradation of the communications performance. To support new cooperative safety applications, providing a high awareness quality is life critical. This issue raises the following research question: How to transmit safety-related information with sufficient reliability by using a potentially undependable communications technology? From a MAC perspective, packet collisions are the main reason for undependable communications in VANETs. Hence, the first part of this work analyzes the sources of packet collisions, as well as their behavior in space and time. The results show, for instance, that a significant amount of packet collisions at close ranges are caused by vehicles, having chosen the same backoff counter (waiting time). Moreover, subsequent packet collisions reveal a (temporal) correlated behavior that may significantly degrade safety-related measures like the update delay or inter-reception time. Based on these results, three new broadcast collision mitigation strategies are intro- duced and evaluated in the second part: First, the geo-backoff concept aims at relocating packet collisions from near to far, as close ranges are much more critical than farther ones for vehicular safety. Therefore, position information is exploited in order to generate the backoff counter. Second, the random transmit jitter concept addresses correlated packet collisions in the time domain, by randomizing the periodic safety-broadcasts around the nominal transmission interval. Finally, the concept of random transmit powers alleviates the same issue by randomizing collision and interference areas in space. From an applications perspective, the important question is more about whether applications requirements are fulfilled, and not about the how. Hence, in the final part the impact of the previously introduced broadcast collision mitigation strategies on application- specific requirements is investigated. Therefore, a new awareness control strategy is proposed. It implements a framework called fish-eye awareness, specifically, it allows to adapt the awareness quality as a function of the range. In a first step, Random Transmit Power Control (RTPC) is proposed. It manages to provide different levels of awareness quality at different ranges, while mitigating correlated packet collisions by randomizing them in space. Because RTPC is able to reduce the channel load, the second step is to combine RTPC with Transmit Rate Control (TRC), and benefit from the gained channel resources by subsequently increasing the transmit rate, and by implication, the quality of the awareness. The Fish-eye Awareness Control (FAC) strategy is evaluated through simulations, with focus on cooperative driving applications, such as platooning. Finally, the geo-backoff and random transmit jitter are integrated as well, to benefit from these collision mitigation strategies in addition.
Quick access
Contact
Bernhard Robert Kloiber
BibTeX reference
@phdthesis{kloiber2014broadcast,
author = {Kloiber, Bernhard Robert},
title = {{Energieeffiziente Concast-Kommunikation in drahtlosen Sensornetzen}},
advisor = {H{\"{a}}rri, J{\'{e}}r{\^{o}}me and Strang, Thomas},
institution = {Ecole Doctorale Informatique, Telecommunications et Electronique},
location = {Paris, France},
month = {12},
referee = {Beylot, Andre-Luc and Dressler, Falko},
school = {Telecom Paristech},
type = {PhD Thesis},
year = {2014},
}
Copyright notice
Links to final or draft versions of papers are presented here to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author's copyright. In most cases, these works may not be reposted or distributed for commercial purposes without the explicit permission of the copyright holder.
The following applies to all papers listed above that have IEEE copyrights: Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.
The following applies to all papers listed above that are in submission to IEEE conference/workshop proceedings or journals: This work has been submitted to the IEEE for possible publication. Copyright may be transferred without notice, after which this version may no longer be accessible.
The following applies to all papers listed above that have ACM copyrights: ACM COPYRIGHT NOTICE. Permission to make digital or hard copies of part or all of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. Copyrights for components of this work owned by others than ACM must be honored. Abstracting with credit is permitted. To copy otherwise, to republish, to post on servers, or to redistribute to lists, requires prior specific permission and/or a fee. Request permissions from Publications Dept., ACM, Inc., fax +1 (212) 869-0481, or permissions@acm.org.
The following applies to all SpringerLink papers listed above that have Springer Science+Business Media copyrights: The original publication is available at www.springerlink.com.
This page was automatically generated using BibDB and bib2web.
Featured Paper
- Incentive-based Platoon Formation: Optimizing the Personal Benefit for Drivers
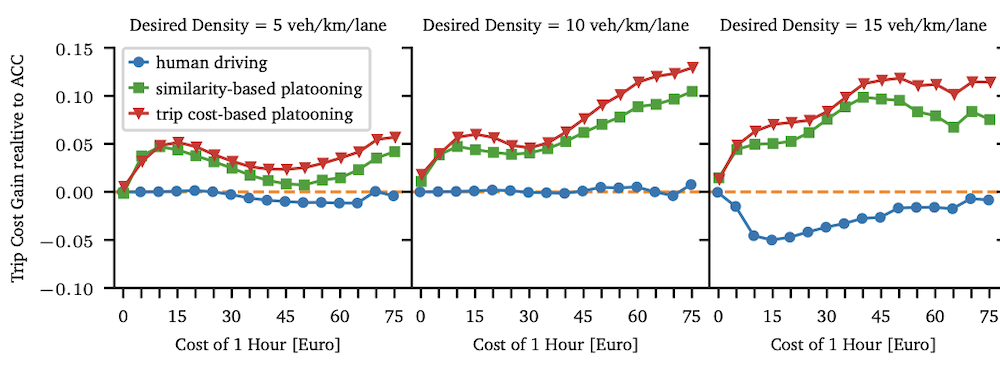
Platooning or cooperative adaptive cruise control (CACC) has been investigated for decades, but debate about its lasting impact is still ongoing. While the benefits of...
News
- June 16, 2025
New IEEE Transactions on Mobile Computing article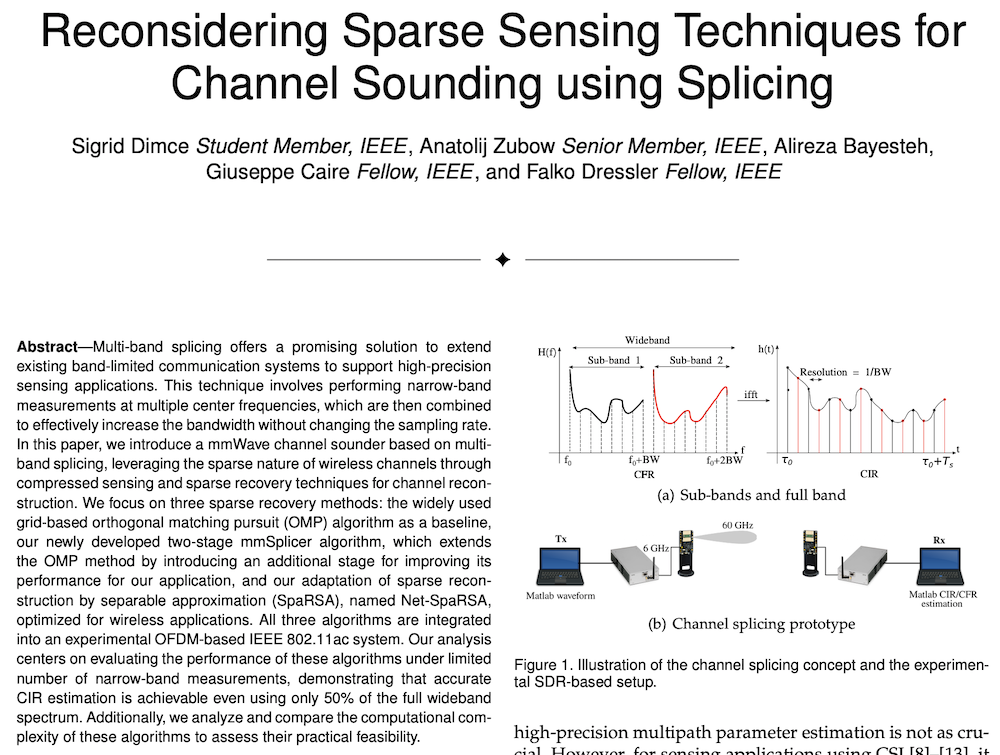
Our article Reconsidering Sparse Sensing Techniques for C... - June 15, 2025
New IEEE Transactions on Wireless Communications article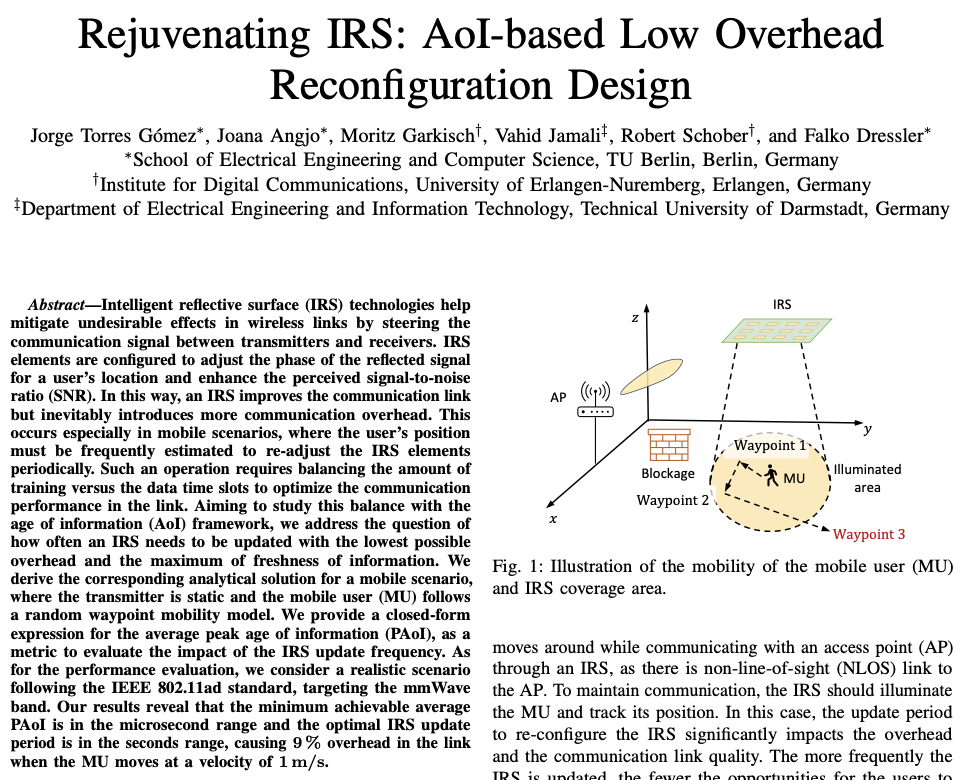
Our article Rejuvenating IRS: AoI-based Low Overhead Reco... - June 13, 2025
New IEEE Open Journal of Intelligent Transportation Systems article
Our article Incentive-based Platoon Formation: Optimizing... - June 11, 2025
Paper Presentation at IEEE ICC 2025
Osman Tugay Başaran presented our paper Next-Gen AI-on-RA... - June 10, 2025
New Elsevier Theoretical Computer Science article
Our article Robust Matroid Bandit Optimization: Near-Opti...